
The ISTVS Student Wheel Design Competition 2026 will be held at the University of Pretoria as part of the 56th International Society for Terrain-Vehicle Systems Conference in October 2026. This inaugural competition challenges student teams to apply terramechanics principles to the design of a high-performance wheel operating in deformable soil. More information on the competition and its aim is published in the Journal of Terramechanics and is available here.

Competition Overview
The ISTVS Student Wheel Design Competition is an engineering design challenge focused specifically on wheel–soil interaction. Unlike vehicle-level competitions, this event isolates the wheel as the primary design variable, allowing teams to directly study how geometry, soil mechanics, and traction performance are related.
Student teams will design a 3D-printable wheel optimized to maximize drawbar pull in controlled soil bin testing. All wheels will be manufactured and tested by the organizers under identical soil, load, and test conditions to ensure fairness and repeatability.
Teams must also predict the angular velocity at which their wheel will produce maximum drawbar pull, encouraging the use of analytical models, terramechanics theory, or numerical simulation rather than trial-and-error prototyping.
The competition evaluates both engineering design performance and predictive modeling accuracy.
Competition overview
Design Challenge
For this year, each team must design a single wheel that:
Is manufacturable using PLA fused deposition modeling (FDM)
Fits within the geometric constraints provided by the organizers
Attaches to a standardized hub interface
Is optimized for traction performance in a predefined sand terrain
Includes a predicted angular velocity for maximum drawbar pull
All wheels will be tested in a single-wheel soil bin test platform where drawbar pull, sinkage, and slip behavior will be measured.
Terrain and Test Conditions
The soil for the 2026 competition will be a prepared and characterized sand terrain. Soil properties such as bulk density and cone index will be provided to teams in advance so that analytical or empirical terramechanics models can be used in the design process.
Testing will be performed using a controlled soil bin system with:
Constant carriage velocity
Controlled vertical load
Instrumented drawbar pull measurement
Wheel speed sweep around the student-specified angular velocity
The maximum drawbar pull measured within the test range will be used for scoring.
Performance Metrics and Scoring
Teams will be evaluated using a combination of experimental performance, prediction accuracy, and technical documentation.
Scoring Breakdown
Drawbar Pull Performance – 50%
Experimental vs Predicted Performance – 10%
Design Report – 20%
Presentation – 20%
Because tractive performance is the primary objective, maximum drawbar pull carries the largest weight in scoring.
Teams must also predict drawbar pull and operating conditions, and their prediction accuracy will contribute to their final score.
Deliverables
Each team must submit:
STL file of the wheel design
Target angular velocity for testing
Predicted drawbar pull
Technical design report (PDF)
Presentation (in person or recorded)
The design report should describe the wheel geometry, modeling or analysis methods, prediction of angular velocity and drawbar pull, and overall design approach.
Schedule
Competition Timeline
13 March 2026 – Registration opens
15 May 2026 – Registration deadline
25 September 2026 – Wheel design and report due
11–15 October 2026 – Presentations and competition at ISTVS Conference
Educational Objective
The ISTVS Student Wheel Design Competition is intended to become a flagship educational activity within the terramechanics community. The competition emphasizes engineering insight over manufacturing complexity, ensuring that success depends on understanding wheel–terrain mechanics such as stress distribution, shear mobilization, slip, and sinkage.
The 2026 event is the inaugural competition and will establish the foundation for future competitions that may expand to include additional terrains, full vehicle systems, and autonomy-based mobility challenges.
Wheel–Soil Modeling Tool for Student Teams
To support student teams in the design process, researchers at Mississippi State University developed an open-source wheel–soil simulation tool that competitors can use to model and evaluate their wheel designs before submission. The simulator is based on the open-source YADE discrete element method (DEM) framework, which allows users to simulate granular soil and wheel interaction numerically. YADE is an extensible open-source DEM framework written in C++ with Python scripting, commonly used for modeling granular materials, soil behavior, and particle interactions.
The wheel–soil simulator allows students to evaluate wheel performance in deformable terrain, estimate drawbar pull, and investigate how wheel geometry affects traction, sinkage, and slip behavior. This tool provides students with the opportunity to apply terramechanics theory, numerical modeling, and engineering analysis as part of the wheel design process.
The ISTVS community would like to acknowledge Bohumir Jelinek for developing and sharing this open-source simulation tool for educational use and for supporting student participation in the competition. Further, the simulator follows the model and source code published by Nakanishi (2020) developed at Kyoto University.
The simulator and documentation are available on GitHub:
Yade DEM Wheel Soil Simulator
LinkedIn post from MSU
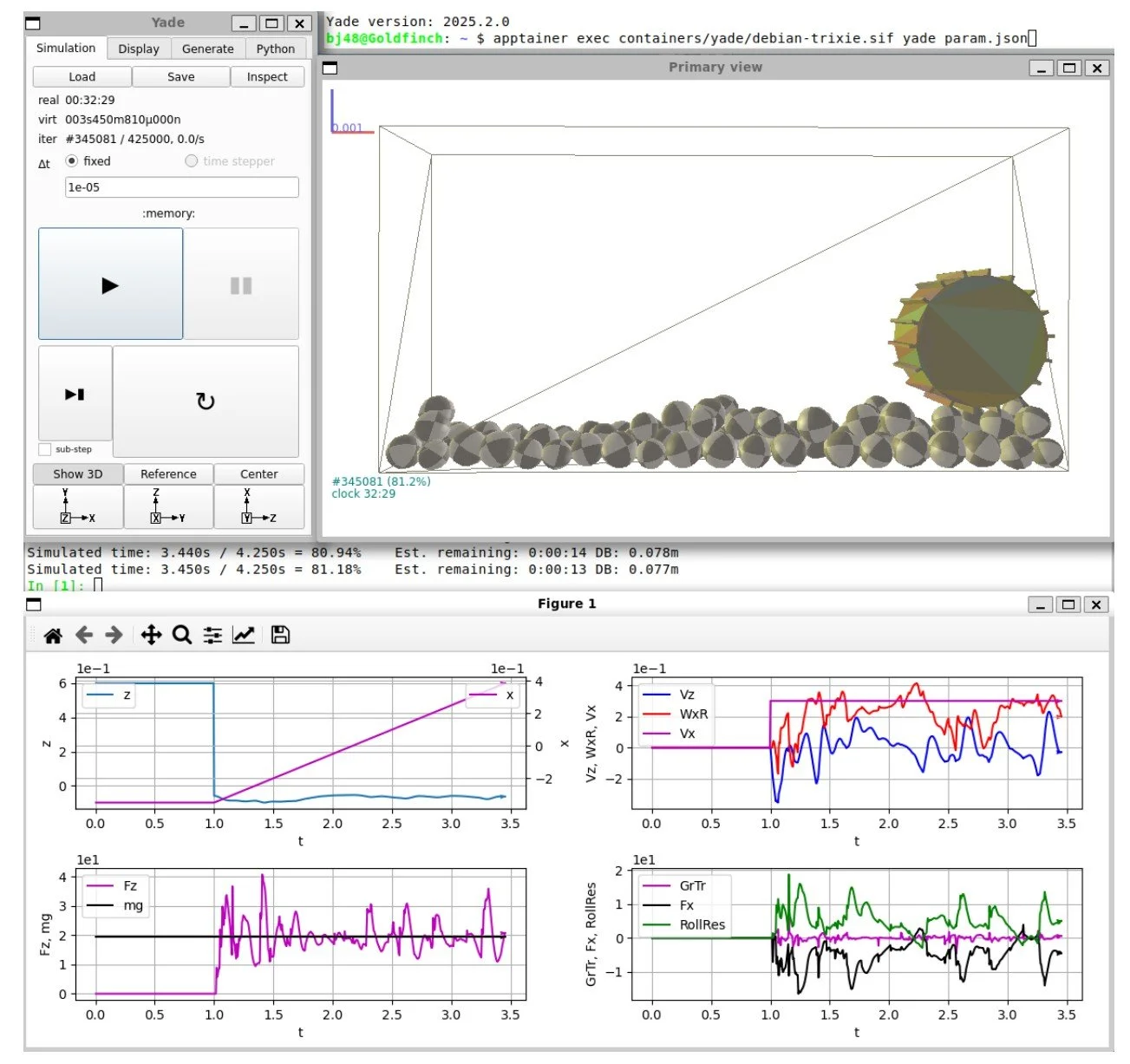
DEM simulation setup for a prototype wheel design
DEM simulation for a prototype wheel design
Registration and Rulebook
Teams can register using the competition registration form. The official rulebook, CAD files, and additional materials are available on the competition Google Drive. Please note that these files may be updated, and the registered teams will be notified. The links are provided below:
Registration Link
Rulebook
Drive with more information
For questions regarding the competition, please contact the competition organizers.
Contact: Andries Peenze – andriespeenze@tuks.co.za